Desbarbado | Granallado | Pulido | Lijado
Perspectiva general
Robots para la eliminación mecánica precisa de material
Mecanizado, fresado, taladrado, escariado, desbarbado y mucho más con los robots Motoman
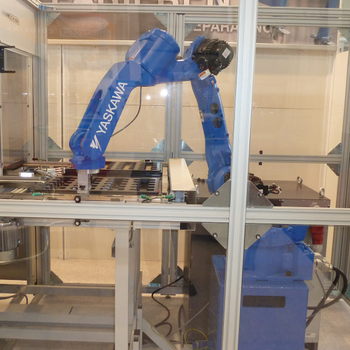
Desde hace décadas, los robots Motoman de Yaskawa se han utilizado excesivamente en una amplia gama de soluciones robóticas para todo tipo de aplicaciones de corte, acabado, pulido, rectificado, fresado, desbarbado u otras aplicaciones de eliminación de material. La razón es que los robots MOTOMAN ofrecen la composición adecuada de rigidez industrial, rigidez, sensibilidad y diseño a prueba de polvo y líquidos que se puede esperar de un robot de 6 ejes que se enfrenta a aplicaciones tan duras, a menudo muy expuestas a fuerzas externas imprevisibles, vibraciones, polvo, virutas, líquidos y todo tipo de variaciones geométricas de las piezas.
Para aplicaciones de retirada de material, recomendamos nuestros robots de la serie GP, que ofrecen un buen equilibrio entre largo alcance y rigidez. Para piezas más grandes o para ampliar el rango de movimiento, es más razonable poner el robot y una pista en lugar de seleccionar un modelo de robot con un brazo largo. Los controladores de Yaskawa son conocidos por su excelente rendimiento de trayectoria, generando los mejores movimientos rectos y circulares de su clase en una amplia gama de movimientos.
Herramientas de ingeniería para la disposición de la célula de trabajo - MotoSim
Los sistemas robóticos de procesamiento de materiales a menudo deben realizar múltiples tareas o pasos de procesamiento: corte y desbarbado, lijado y pulido, pasos de rectificado con diferentes tamaños de grano, etc. Para realizar las distintas tareas pueden utilizarse dos enfoques: múltiples husillos o husillos que pueden cambiar de medios o herramientas. El robot puede manejar la herramienta o la pieza. Cada aplicación requiere cierta ingeniería para definir la configuración correcta del diseño de la célula y la postura óptima del robot. Los experimentados ingenieros de aplicaciones de Yaskawa Motoman le ayudarán a determinar el mejor enfoque para su proyecto, a menudo con la ayuda de nuestras herramientas de ingeniería como MotoSim. MotoSim incluye una función CAM para generar una trayectoria del robot para el fresado.
Herramientas de ingeniería CAD/CAM (CAD-to-Path) para la generación de trayectorias
Las aplicaciones de procesamiento de materiales se programan a menudo a través de herramientas de simulación CAD/CAM, utilizando la interfaz estándar G-Code con el controlador del robot para la generación automática de trayectorias directamente desde el modelo CAD. Nuestra herramienta MotoSimEG-VRC ofrece algunas funcionalidades para ello, pero también encontrará robots Motoman registrados en las bibliotecas de casi todas las herramientas de software CAD/CAM de terceros disponibles en el mercado.
Eliminación de material con control de fuerza
Para garantizar una presión superficial constante en los productos contorneados, a menudo se utiliza un dispositivo de control de fuerza activa o de detección para optimizar el acabado de la pieza y aumentar la eficacia del uso de consumibles abrasivos. En ocasiones, pueden intervenir sistemas de visión para guiar al robot o realizar una inspección de calidad. Nuestros controladores de robot FS100/YRC1000 disponen de todo tipo de opciones de interfaz de sensores digitales, analógicos y de bus de campo, lo que garantiza la interconexión de señales de alta velocidad necesaria para controlar el proceso.
Fresado robótico con robots de la serie GP
En comparación con las fresadoras estacionarias de 5 ejes controladas por CNC, que son lo suficientemente rígidas como para procesar todo tipo de piezas de acero, la estructura cinemática de 6 ejes de un robot industrial funciona bien con materiales más blandos como el aluminio (por ejemplo, escaleras, barandillas, elementos de andamiaje), arena (moldes de arena), madera (muebles), poliestireno (prototipos) y cualquier tipo de plástico, por ejemplo, para la conformación en 3D de productos industriales u ortopédicos. La cartera de robots de Motoman le ayuda a encontrar el compromiso adecuado de la longitud del brazo del robot: un brazo corto es bueno para la estabilidad, un brazo largo es bueno para las piezas grandes, los arreglos de robots montados en el techo pueden ser un buen compromiso para obtener un alcance máximo en una mesa. También en este caso, es buena idea comprobar si el robot puede mover la pieza de trabajo por delante de un husillo estacionario. Para entornos difíciles, como el polvo de lijado o la exposición permanente a líquidos de refrigeración agresivos), recomendamos nuestros modelos de robots con alta protección IP65/67 y/o revestimientos especiales anticorrosivos (serie GP-ACC). Y, si realmente opta por fresadoras CNC estacionarias para procesar las piezas, considere la posibilidad de utilizar robots para la automatización de la alimentación de la máquina (carga/descarga de piezas desde/hacia la máquina).
Robots Motoman para el fresado de piedras
Robots Motoman para el mecanizado de acero duro
El mecanizado de acero duro es posible, pero los parámetros del proceso deben ajustarse cuidadosamente para evitar las vibraciones.
Robots Motoman para el mecanizando de aluminio
En este ejemplo de aplicación, el robot mueve la pieza alrededor de una herramienta estacionaria.
Robots Motoman fresando material de corcho
Cuanto más blando es el material, más fácil es el trabajo para los robots. Los robots Motoman pueden producir interesantes geometrías en 3D.
Robots Motoman que moldean espumas y poliestireno
Robots Motoman manipulando piezas en una fresadora estacionaria
Desbarbado con Robots Motoman Serie GP
Muchas empresas tienen problemas para encontrar empleados para los trabajos de desbarbado, considerándolos triviales, repetitivos y aburridos. Desgraciadamente, los trabajos de desbarbado requieren resistencia, paciencia y precisión: ¡un punto de partida perfecto para pensar en la automatización robótica!
Para el desbarbado automático de piezas mecanizadas con CNC, puede utilizar cualquier robot de la serie GP, seleccionado por su carga útil y alcance para el tamaño de su pieza. Muchos clientes de mecanizado CNC combinan la operación de atención a la máquina con trabajos de desbarbado e inspección en el tiempo de inactividad mientras el ciclo de mecanizado CNC está en marcha. La versatilidad cinemática y la magnífica precisión de trayectoria de nuestros robots de 6 ejes de la serie GP permiten desbarbar piezas con geometrías complejas.
Otro concepto es llevar parches de piezas a una estación de desbarbado dedicada.
El desbarbado de piezas fundidas puede requerir herramientas de desbarbado controladas por fuerza robótica.
Algunas aplicaciones de desbarbado requieren visión artificial, por ejemplo, si hay que eliminar residuos de moldeo no definidos. Las piezas grandes pueden colocarse en palés (no fijos), y un sistema de visión artificial 2D o 3D (Motosight2D) puede comunicar al robot la posición individual de la pieza. Las soluciones de gama realmente alta utilizan una tecnología de visión más avanzada para detectar y tratar las rebabas de tamaño aleatorio.
El desbarbado de las piezas de plástico -por ejemplo, después de los procesos de moldeo por inyección- es muy eficaz para conseguir una calidad constante y elevada, por ejemplo, en los paneles interiores de automóviles.
Taladrado y escariado con robots Motoman
En comparación con las máquinas de taladrado estacionarias, los robots están en desventaja en términos de precisión debido a su estructura cinemática de movimiento de 6 ejes dependiente de la posición, y son realmente adecuados sólo para longitudes de taladrado más bien cortas. El taladrado que incluye la eliminación de virutas u otros residuos de procesamiento del CNC puede ser más fácil de lo que cree...